




RB240 Máquina Automática de Caixas Rígidas
| Modelo | RB240 | |
| 1 | Tamanho do papel (A×B) | Mín.45×110mmMáx. 305×450 mm |
| 2 | Tamanho da caixa (L×C) | Mín. 35×45 mmMáx. 160×240 mm |
| 3 | Espessura do papel | 80-160g/m2 |
| 4 | Espessura do papelão (T) | 0,5~3 mm |
| 5 | Altura da caixa (H) | 12-80 mm |
| 6 | Tamanho de papel dobrável (R) | 8-20 mm |
| 7 | Precisão | ±0,50 mm |
| 8 | Velocidade | ≦32 folhas/min |
| 9 | Potência do motor | 13kw/380v trifásico |
| 10 | Peso da máquina | 3300 kg |
| 11 | Dimensão da máquina (C×L×A) | C4500×L4000×A 2600 mm |
1. Os tamanhos máximo e mínimo das caixas estão sujeitos aos do papel e à qualidade do papel.
2. A velocidade da máquina depende do tamanho das caixas.
3. Não fornecemos compressor de ar.
A relação correspondente entre os parâmetros:
W+2H-4T≤C(Máx.) L+2H-4T≤D(Máx.)
A(Mín.)≤W+2H+2T+2R≤A(Máx.) B(Mín.)≤L+2H+2T+2R≤B(Máx.)
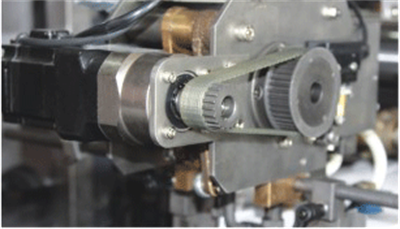
Novo alimentador servo controlado
O novo alimentador de papel servocontrolado adota o tipo de pós-sucção e pré-empurrão para transportar o papel, o que evita eficientemente que dois pedaços de papel entrem na máquina.

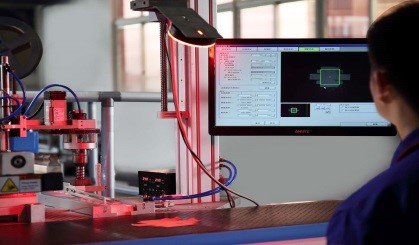
Painel de controle de todos os ícones
Painel de controle com todos os ícones de design amigável, fácil de entender e operar.
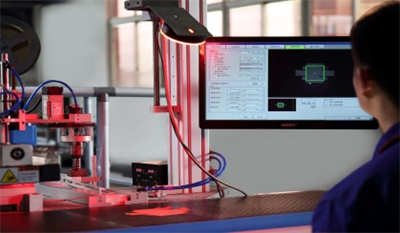
Posicionamento da câmera HD
A tecnologia de posicionamento da câmera HD torna a operação fácil e precisa.
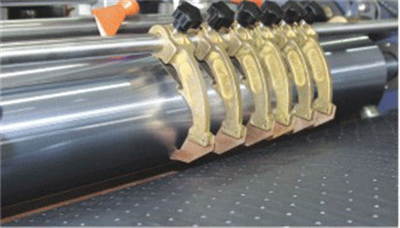
Raspador de cobre projetado pela Line-touch
O raspador de cobre coopera com o rolo de cola por meio de um design de toque de linha, o que torna o raspador mais durável.

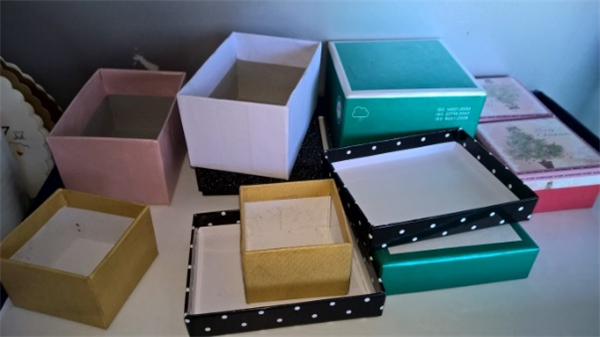
Caixa de colagem automática de quatro ângulos
Adote fita ecológica para colar os ângulos da caixa, o que permite colar quatro ângulos em um único processo com uma aparência elegante.
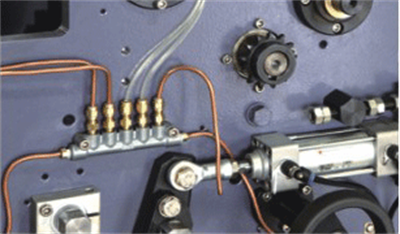
Sistema de lubrificação concentrada
O sistema de óleo concentrado garante a lubrificação completa de todas as peças e o funcionamento estável da máquina.
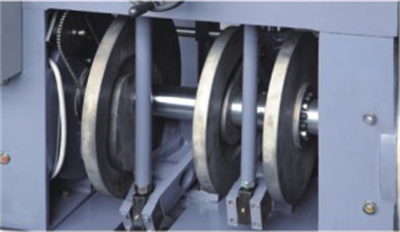
Disco de came de qualidade
Adote cames de disco de aço de liga 38CrMoAl.
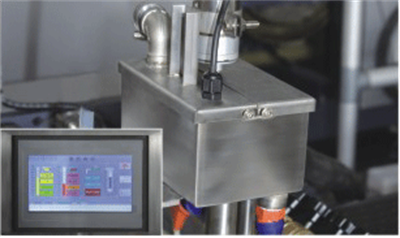
Medidor de viscosidade de cola (opcional)
O medidor automático de viscosidade da cola ajusta com eficiência a pegajosidade da cola, o que garante a qualidade dos produtos acabados.



Categorias de produtos
-

Máquina de polimento e douramento DL-L410MT
-

Máquina automática para colar cabos de papel com corda redonda
-
-2-300x169.jpg)
Sistema de encadernação de alta velocidade Cambridge-12000 (Full...
-

Fabricante de capas inteligentes R18
-

MÁQUINA DE PRENSAGEM E VINCO PC560
-

WSFM1300C Revestimento automático de extrusão de papel PE ...