










EF-၆၅၀/၈၅၀/၁၁၀၀ အလိုအလျောက်ဖိုင်တွဲကော်စက်



| EF-၆၅၀ | EF-၈၅၀ | EF-၁၁၀၀ | |
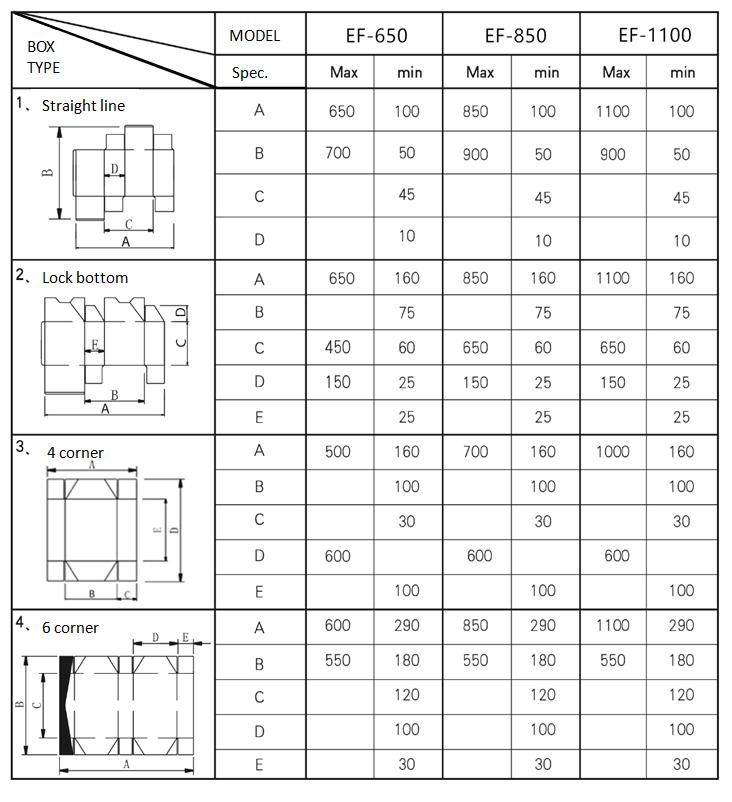
| အများဆုံး စက္ကူပြားအရွယ်အစား | ၆၅၀X၇၀၀ မီလီမီတာ | ၈၅၀X၉၀၀ မီလီမီတာ | ၁၁၀၀X၉၀၀ မီလီမီတာ |
| အနည်းဆုံး စက္ကူပြားအရွယ်အစား | ၁၀၀X၅၀ မီလီမီတာ | ၁၀၀X၅၀ မီလီမီတာ | ၁၀၀X၅၀ မီလီမီတာ |
| သက်ဆိုင်သော စက္ကူဘုတ် | စက္ကူပြား ၂၅၀ ဂရမ် - ၈၀၀ ဂရမ်၊ လှိုင်းတွန့်စက္ကူ F, E | ||
| အမြင့်ဆုံးခါးပတ်မြန်နှုန်း | ၄၅၀ မီတာ/မိနစ် | ၄၅၀ မီတာ/မိနစ် | ၄၅၀ မီတာ/မိနစ် |
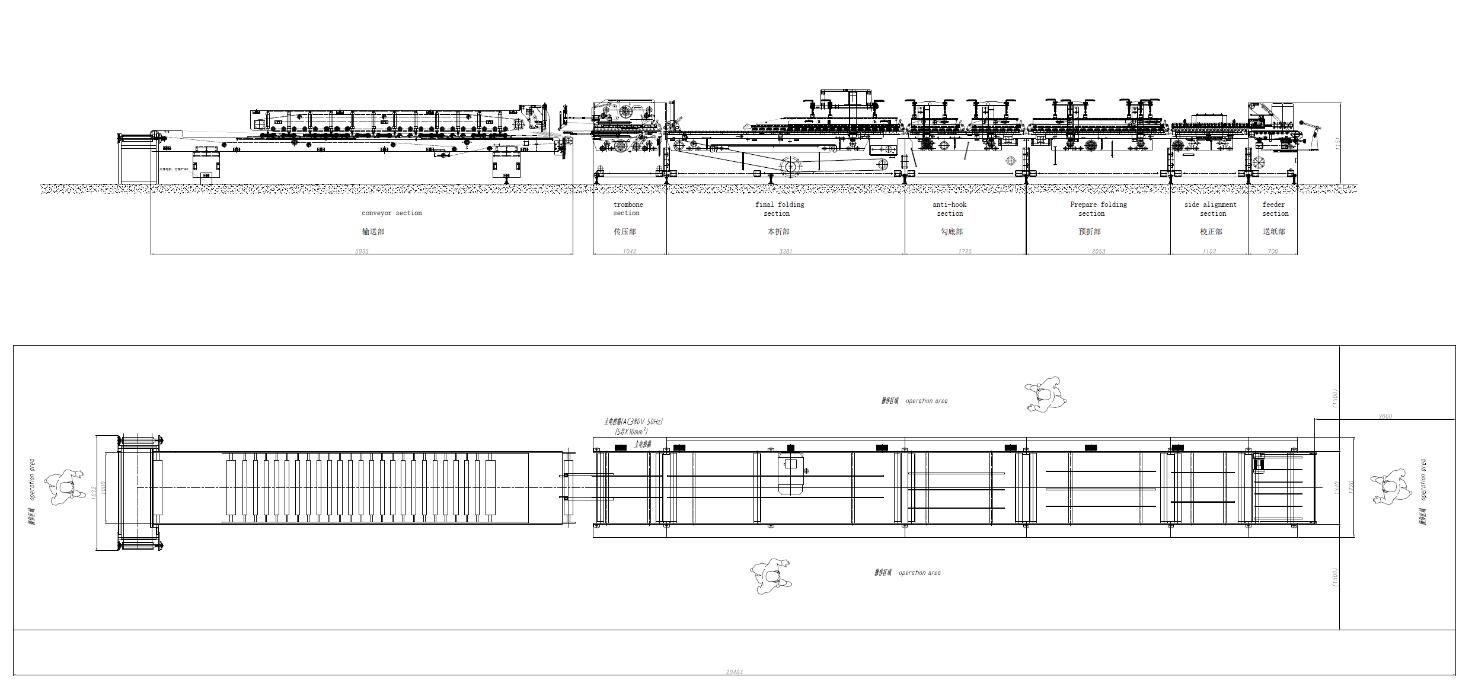
| စက်အရှည် | ၁၆၈၀၀ မီလီမီတာ | ၁၆၈၀၀ မီလီမီတာ | ၁၆၈၀၀ မီလီမီတာ |
| စက်အကျယ် | ၁၃၅၀ မီလီမီတာ | ၁၅၀၀ မီလီမီတာ | ၁၈၀၀ မီလီမီတာ |
| စက်အမြင့် | ၁၄၅၀ မီလီမီတာ | ၁၄၅၀ မီလီမီတာ | ၁၄၅၀ မီလီမီတာ |
| စုစုပေါင်းပါဝါ | ၁၈.၅ ကီလိုဝပ် | ၁၈.၅ ကီလိုဝပ် | ၁၈.၅ ကီလိုဝပ် |
| အများဆုံး ရွှေ့ပြောင်းမှု | ၀.၇ မီတာ/မိနစ် | ၀.၇ မီတာ/မိနစ် | ၀.၇ မီတာ/မိနစ် |
| စုစုပေါင်းအလေးချိန် | ၅၅၀၀ ကီလိုဂရမ် | ၆၀၀၀ ကီလိုဂရမ် | ၆၅၀၀ ကီလိုဂရမ် |
| ဖွဲ့စည်းပုံ | ယူနစ်များ | စံ | ရွေးချယ်နိုင်သည် | |
| ၁ | ကျွေးစက်အပိုင်း |
| √ |
|
| 2 | ဘေးထွက်မှတ်ပုံတင်အပိုင်း |
| √ |
|
| 3 | ကြိုတင်ခေါက်သည့် အပိုင်း |
| √ |
|
| 4 | အောက်ခြေရှိ Crash Lock |
| √ |
|
| 5 | အောက်ဘက် ကော်ကပ်ယူနစ် ဘယ်ဘက်ခြမ်း |
| √ |
|
| 6 | အောက်ဘက် ကော်ကပ်ယူနစ် ညာဘက်ခြမ်း |
| √ |
|
| 7 | ဖုန်စုပ်စက်ပါသော ကြိတ်စက် |
| √ |
|
| 8 | HHS 3 Guns အအေးကော်စနစ် |
|
| √ |
| 9 | ခေါက်ခြင်းနှင့်ပိတ်ခြင်းအပိုင်း |
| √ |
|
| 10 | မော်တာဖြင့် ချိန်ညှိခြင်း |
|
|
|
| 11 | လေဖိအားသုံး ပုံနှိပ်ကဏ္ဍ |
|
|
|
| 12 | ၄ နှင့် ၆-ထောင့် ကိရိယာ |
|
|
|
| 13 | Servo မောင်းနှင်သော Trombone ယူနစ် |
| √ |
|
| 14 | ကွန်ဗေယာတွင် အောက်ခြေစတုရန်းကိရိယာကို သော့ခတ်ပါ |
|
| √ |
| ၁5 | Pကွန်ဗေယာရှိ နျူမက်တစ် စတုရန်းကိရိယာ |
|
|
|
| 16 | မီနီဘောက်စ် ကိရိယာ |
|
|
|
| 17 | LED မျက်နှာပြင်ထုတ်လုပ်မှု |
|
|
|
| 18 | ဖုန်စုပ်စက် |
| √ |
|
| 19 | ထရွမ်ဘုန်းပေါ်ရှိ ထုတ်လွှတ်သည့်လမ်းကြောင်း |
|
|
|
| 20 | Mဂရပ်ဖစ်ဒီဇိုင်းမျက်နှာပြင်ပါရှိသော ain ထိတွေ့မျက်နှာပြင် |
| √ |
|
| 21 | အပိုအစာကျွေးစက်နှင့်သယ်ဆောင်သူခါးပတ် |
|
|
|
| 22 | အဝေးထိန်းစနစ်နှင့် ရောဂါရှာဖွေခြင်း |
| √ |
|
| 23 | သေနတ် ၃ လက်ပါ ပလာစမာစနစ် |
|
| √ |
| 24 | ထပ်ခါတလဲလဲလုပ်ဆောင်နေတဲ့ အလုပ်တွေကို သိမ်းဆည်းဖို့အတွက် မှတ်ဉာဏ်လုပ်ဆောင်ချက် |
| ||
| 25 | ချိတ်မတပ်ထားသော အောက်ခြေပျက်စီးသည့်ကိရိယာ |
| ||
| 26 | အလင်းအတားအဆီးနှင့် ဘေးကင်းရေးကိရိယာ | √ | ||
| 27 | ၉၀ ဒီဂရီလှည့်ကိရိယာ | √ | ||
| 28 | ကော်တိပ်ကပ်ခြင်း | √ | ||
| 29 | ဂျပန် NSK မှ ဖိသွင်းသည့် ဘီးရင်းရိုလာ | √ |
| |
| 30 | KQ 3 ကော်စနစ်ဖြင့် မြင့်မားသောဖိအားစုပ်စက် | √ |
၁) အစာကျွေးဌာန
Feeder အပိုင်းတွင် သီးခြားမော်တာမောင်းနှင်စနစ်တစ်ခုရှိပြီး အဓိကစက်နှင့် ထပ်တူကျအောင် ထိန်းသိမ်းထားသည်။
သတ်မှတ်ထားသော အကျယ်အတိုင်း ဘေးတိုက်ရွှေ့ရန် ၃၀ မီလီမီတာ အစာကျွေးခါးပတ် ၇ ခုနှင့် ၁၀ မီလီမီတာ သတ္တုပြား။
ဖောင်းကြွထားသော ရိုလာသည် အစာကျွေးခါးပတ်ကို လမ်းညွှန်ပေးသည်။ ဘေးနှစ်ဖက်ပါကင်သည် ထုတ်ကုန်ဒီဇိုင်းနှင့် ကိုက်ညီသည်။
ထုတ်ကုန်နမူနာအလိုက် ချိန်ညှိနိုင်ရန် ကျွေးသည့်အပိုင်းတွင် ပြင်ပအစာကျွေးသည့် ဓားသုံးချောင်း တပ်ဆင်ထားသည်။
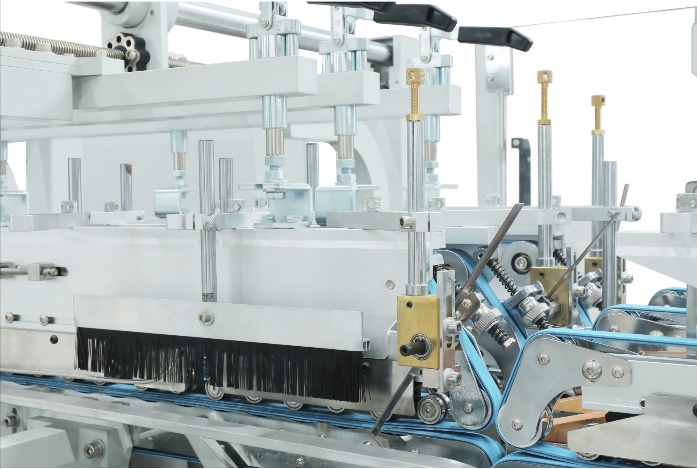
တုန်ခါမှုကိရိယာသည် စက္ကူများကို မြန်ဆန်၊ လွယ်ကူစွာ၊ စဉ်ဆက်မပြတ်နှင့် အလိုအလျောက် ကျွေးမွေးနေစေပါသည်။
စက္ကူကို ချောမွေ့စွာ ကျွေးနိုင်စေရန်အတွက် ၄၀၀ မီလီမီတာ အမြင့်ရှိသော ကျွေးသည့်အပိုင်းနှင့် ဘရက်ရှ်ရိုလာ ဖုန်မှုန့်ကာကွယ်ရေးကိရိယာတို့ ပါဝင်ပါသည်။
အော်ပရေတာသည် စက်၏ မည်သည့်နေရာတွင်မဆို feeding switch ကို လည်ပတ်နိုင်သည်။
ကျွေးစက်ခါးပတ်ကို စုပ်ယူခြင်းလုပ်ဆောင်ချက် (ရွေးချယ်နိုင်သည်) တပ်ဆင်ထားနိုင်သည်။
လွတ်လပ်သော မော်နီတာသည် စက်၏အမြီးပိုင်းတွင် စွမ်းဆောင်ရည်ကို စစ်ဆေးနိုင်သည်။

၂) ဘေးထွက်မှတ်ပုံတင်ယူနစ်
တိကျစွာ ကျွေးမွေးနိုင်စေရန်အတွက် ကျွေးမွေးယူနစ်မှ စက္ကူကို ဘေးမှတ်ပုံတင်ယူနစ်တွင် ပြုပြင်နိုင်သည်။
ဘုတ်ပြားအထူအမျိုးမျိုးနှင့် ကိုက်ညီစေရန် မောင်းနှင်ထားသောဖိအားကို အပေါ်အောက် ချိန်ညှိနိုင်သည်။
၃) ကြိုတင်ခေါက်ထားသော အပိုင်း
အထူးဒီဇိုင်းက ပထမခေါက်မျဉ်းကို ၁၈၀ ဒီဂရီနှင့် တတိယခေါက်မျဉ်းကို ၁၆၅ ဒီဂရီ ကြိုတင်ခေါက်နိုင်သောကြောင့် သေတ္တာကို ဖွင့်ရလွယ်ကူစေပါသည်။ဉာဏ်ရည်ထက်မြက်သော servo-motor နည်းပညာပါရှိသော ထောင့် ၄ ခုပါ ခေါက်သိမ်းစနစ်။ အီလက်ထရွန်းနစ်နည်းဖြင့် ထိန်းချုပ်ထားသော သီးခြားရိုးတံနှစ်ခုတွင် တပ်ဆင်ထားသော ချိတ်များဖြင့် နောက်ဘက်အဖုံးအားလုံးကို တိကျစွာ ခေါက်သိမ်းနိုင်စေပါသည်။

၄) အောက်ခြေရှိ Crash lock
ပြောင်းလွယ်ပြင်လွယ်ဒီဇိုင်းနှင့် မြန်ဆန်သောလည်ပတ်မှုဖြင့် အောက်ခြေကို ခေါက်သိမ်းနိုင်သော လော့ခ်ချစနစ်။
Crash-bottom ကို ကိရိယာအစုံ ၄ စုံဖြင့် အပြီးသတ်နိုင်သည်။
၂၀ မီလီမီတာ အပြင်ဘက်ခါးပတ်များနှင့် ၃၀ မီလီမီတာ အောက်ခြေခါးပတ်များ။ အပြင်ဘက်ခါးပတ်ပြားcam စနစ်ဖြင့် ဘုတ်အထူအမျိုးမျိုးနှင့် ကိုက်ညီစေရန် အပေါ်အောက် ချိန်ညှိနိုင်သည်။
၅) အောက်ပိုင်းကော်ယူနစ်
ဘယ်နှင့်ညာ ကော်ယူနစ်တွင် ရရှိနိုင်သော ၂ မီလီမီတာ သို့မဟုတ် ၄ မီလီမီတာ ကော်ဘီး တပ်ဆင်ထားသည်။
၆) ခေါက်ခြင်းနှင့်ပိတ်ခြင်းအပိုင်း
ဒုတိယမျဉ်းက ၁၈၀ ဒီဂရီဖြစ်ပြီး စတုတ္ထမျဉ်းက ၁၈၀ ဒီဂရီဖြစ်ပါတယ်။
ဂီယာခေါက်ခါးပတ်အမြန်နှုန်း၏ အထူးဒီဇိုင်းကို သေတ္တာလည်ပတ်မှုဦးတည်ရာကို တည့်မတ်စေရန်အတွက် တစ်ခုချင်းစီ ချိန်ညှိနိုင်သည်။
၇) မော်တာဖြင့် ချိန်ညှိခြင်း
ခေါက်ပြားချိန်ညှိမှုရရှိစေရန် မော်တာတပ်ဆင်ထားသော ချိန်ညှိမှုကို တပ်ဆင်ထားနိုင်သည်။



၈) လေဖိအားသုံး စာနယ်ဇင်း အပိုင်း
သေတ္တာအရှည်ပေါ်မူတည်ပြီး အပေါ်ပိုင်းကို ရှေ့နှင့်နောက်သို့ ရွှေ့နိုင်သည်။
တစ်ပြေးညီဖိအားကို ထိန်းသိမ်းရန် လေဖိအားချိန်ညှိမှု။
ဖိထားသော ခွက်နေသော အစိတ်အပိုင်းများတွင် အထူးအပိုရေမြှုပ်ကို လိမ်းနိုင်သည်။
အလိုအလျောက်မုဒ်တွင်၊ ဖိစက်၏အမြန်နှုန်းသည် ထုတ်လုပ်မှု၏ တသမတ်တည်းမှုကို မြှင့်တင်ရန် အဓိကစက်နှင့် တစ်ပြိုင်နက်တည်းရှိနေပါသည်။

၉) ၄ နှင့် ၆-ထောင့်ကိရိယာ
ရွေ့လျားမှုမော်ဂျူးပါရှိသော Yasakawa servo စနစ်သည် မြန်နှုန်းမြင့်တောင်းဆိုမှုနှင့် ကိုက်ညီစေရန် မြန်နှုန်းမြင့်တုံ့ပြန်မှုကို သေချာစေသည်။လွတ်လပ်သော ထိတွေ့မျက်နှာပြင်သည် ချိန်ညှိမှုကို လွယ်ကူချောမွေ့စေပြီး လုပ်ဆောင်ချက်ကို ပိုမိုပြောင်းလွယ်ပြင်လွယ်ရှိစေပါသည်။



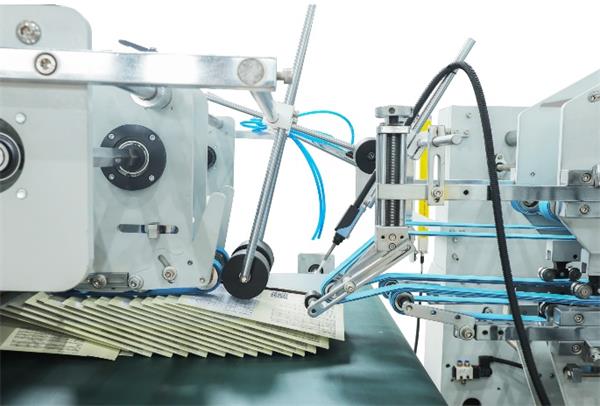
၁၀) Servo Driven Trombone ယူနစ်
“kicker” စက္ကူကို အလိုအလျောက် သို့မဟုတ် spray ink ဖြင့် photocell ရေတွက်စနစ်ကို အသုံးပြုပါ။
ယိုစိမ့်မှုစစ်ဆေးသည့်စက်။
တက်ကြွသောဂီယာဖြင့် ခါးပတ်ပတ်၍ လည်ပတ်သည်။
ယူနစ်တစ်ခုလုံးကို လွတ်လပ်သော servo မော်တာဖြင့် မောင်းနှင်ပြီး box interval ကို လိုအပ်သလို ချိန်ညှိပေးပါသည်။

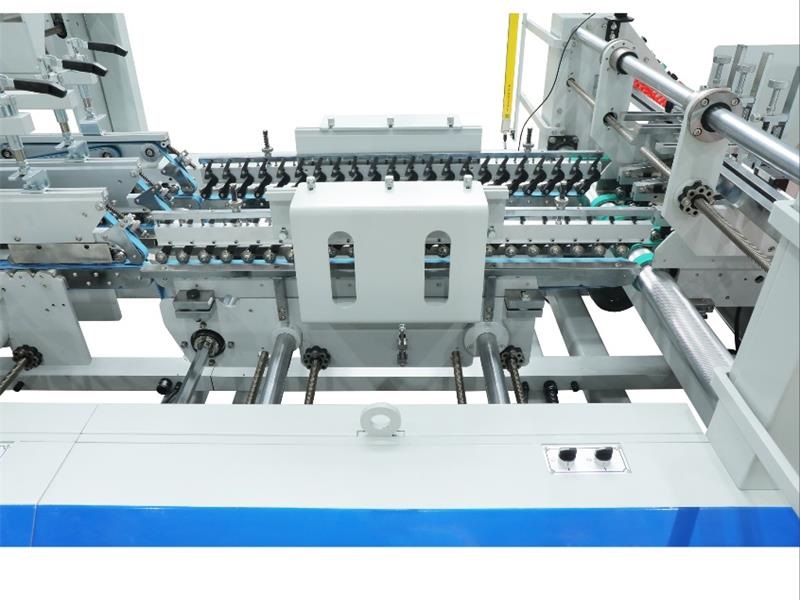
၁၁) ကွန်ဗေယာမှာ အောက်ခြေစတုရန်းကိရိယာကို သော့ခတ်ပါ
လေးထောင့်ကိရိယာသည် မော်တာသုံး သယ်ယူပို့ဆောင်ရေးခါးပတ် အမြင့်ချိန်ညှိခြင်းဖြင့် ကွေးညွှတ်သေတ္တာကို လေးထောင့်ကျကျ ကောင်းမွန်စွာဖြစ်စေနိုင်သည်။

၁၂) သယ်ယူပို့ဆောင်ရေးမှာ လေဖိအားသုံး စတုရန်းကိရိယာ
ကွန်ဗေယာတွင် သယ်ဆောင်ကိရိယာနှစ်ခုပါသော လေဖိအားသုံး စတုရန်းကိရိယာသည် ကျယ်ပြန့်သော်လည်း ရေတိမ်သောပုံသဏ္ဍာန်ရှိသော ကတ်ထူပုံးကို ပြီးပြည့်စုံသော စတုရန်းရရှိစေရန် သေချာစေသည်။

၁၃) မီနီဘောက်စ် ကိရိယာ
အဆင်ပြေစွာလည်ပတ်နိုင်ရန်အတွက် ဂရပ်ဖစ်ဒီဇိုင်းမျက်နှာပြင်ပါရှိသော အဓိကထိတွေ့မျက်နှာပြင်။

၁၄) ဂရပ်ဖစ်ဒီဇိုင်းမျက်နှာပြင်ပါရှိသော အဓိကထိတွေ့မျက်နှာပြင်
အဆင်ပြေစွာလည်ပတ်နိုင်ရန်အတွက် ဂရပ်ဖစ်ဒီဇိုင်းမျက်နှာပြင်ပါရှိသော အဓိကထိတွေ့မျက်နှာပြင်။

၁၅) ထပ်ခါတလဲလဲလုပ်ဆောင်နေသော အလုပ်များကို သိမ်းဆည်းရန် မှတ်ဉာဏ်လုပ်ဆောင်ချက်
ဆာဗိုမော်တာအစုံ ၁၇ စုံအထိသည် ပန်းကန်တစ်ခုစီ၏ အရွယ်အစားကို မှတ်သားပြီး နေရာယူနိုင်သည်။
သိမ်းဆည်းထားသော အော်ဒါတစ်ခုစီနှင့် နှိုင်းယှဉ်ပါက စက်ကို သတ်မှတ်ထားသော အရွယ်အစားသို့ သတ်မှတ်ရန် သီးခြားထိတွေ့မျက်နှာပြင်က လွယ်ကူချောမွေ့စေသည်။


၁၆) NON-ချိတ်ပျက်ကျမှုအောက်ခြေကိရိယာ
အထူးဒီဇိုင်းစောင်းဖြင့် သေတ္တာ၏အောက်ခြေကို ရိုးရာချိတ်မပါဘဲ မြန်နှုန်းမြင့်ဖြင့် ပြုတ်ကျနိုင်သည်။

၁၇) အလင်းအတားအဆီးနှင့်ဘေးကင်းရေးကိရိယာ
အပြည့်အဝ စက်ပိုင်းဆိုင်ရာ အကာအကွယ်ဖြင့် ထိခိုက်ဒဏ်ရာရရှိနိုင်ခြေအားလုံးကို ဖယ်ရှားပေးပါသည်။
Leuze မီးအကာအရံ၊ ချိတ်တံခါးခလုတ်အပြင် ဘေးကင်းရေးရီလေးသည် redundant circuit ဒီဇိုင်းဖြင့် CE တောင်းဆိုမှုကို ဖြည့်ဆည်းပေးပါသည်။

၁၈) ဂျပန် NSK မှ ဝက်အူလိပ်ကို နှိပ်ခြင်း
NKS bearing သည် press roller စက်ကဲ့သို့ ပြီးပြည့်စုံပြီး စက်သည် ဆူညံသံနည်းပါးပြီး ကြာရှည်ခံသောကြောင့် ချောမွေ့စွာလည်ပတ်သည်။

| ပြင်ပအရင်းအမြစ်စာရင်း | |||
| အမည် | အမှတ်တံဆိပ် | မူလအစ | |
| ၁ | အဓိက မော်တာ | ဒေါင်ယွမ် | ထိုင်ဝမ် |
| 2 | အင်ဗာတာ | V&T | တရုတ်နိုင်ငံတွင် ပူးတွဲလုပ်ကိုင်သည် |
| 3 | လူ-စက် အပြန်အလှန် ဆက်သွယ်ချက် | Panel Master | ထိုင်ဝမ် |
| 4 | synchronous ခါးပတ် | OPTI | ဂျာမနီ |
| 5 | V-Ribbed Belt | ဟတ်ချင်ဆန် | ဖရန့်ချ် |
| 6 | ဘီးရင်း | NSK၊ SKF | ဂျပန်/ဂျာမနီ |
| 7 | အဓိကဝင်ရိုး | ထိုင်ဝမ် | |
| 8 | အစီအစဉ်ခါးပတ် | နစ်တာ | ဂျပန် |
| 9 | ပီအယ်လ်စီ | ဖာတက်ခ် | ထိုင်ဝမ် |
| 10 | လျှပ်စစ် အစိတ်အပိုင်းများ | ရှနိုက်ဒါ | ဂျာမနီ |
| 11 | လေဖိအားသုံး | အဲယားတက်ခ် | ထိုင်ဝမ် |
| 12 | လျှပ်စစ်ရှာဖွေခြင်း | ဆန်အိတ်စ် | ဂျပန် |
| 13 | လိုင်းယာ လမ်းညွှန်ကိရိယာ | SHAC | ထိုင်ဝမ် |
| 14 | ဆာဗိုစနစ် | ဆန်ယို | ဂျပန် |
စက်သည် ဆူညံသံနည်းပါးခြင်း၊ တည်ငြိမ်သောလည်ပတ်မှုနှင့် ပြုပြင်ထိန်းသိမ်းမှုလွယ်ကူခြင်းတို့ကို ပြုလုပ်နိုင်သည့် multi-groove belt transmission structure ကို အသုံးပြုထားသည်။
စက်သည် အလိုအလျောက်ထိန်းချုပ်မှုရရှိရန်နှင့် ပါဝါချွေတာရန်အတွက် frequency converter ကို အသုံးပြုသည်။
သွားတစ်ချောင်း ချိန်ညှိမှုပါရှိသော လုပ်ဆောင်ချက်သည် လွယ်ကူပြီး အဆင်ပြေပါသည်။ လျှပ်စစ်ချိန်ညှိမှုသည် စံသတ်မှတ်ချက်ဖြစ်သည်။
အစာကျွေးခါးပတ်သည် စဉ်ဆက်မပြတ်၊ တိကျပြီး အလိုအလျောက် အစာကျွေးနိုင်စေရန်အတွက် တုန်ခါမှုမော်တာတပ်ဆင်ထားသော အပိုထူသောခါးပတ်များစွာကို အသုံးပြုထားသည်။
အထူးဒီဇိုင်းပါရှိသော အပေါ်သို့ ခါးပတ်၏ ပိုင်းခြားပြားကြောင့်၊ ခါးပတ်တင်းအားကို လက်ဖြင့်အစား ထုတ်ကုန်အလိုက် အလိုအလျောက် ချိန်ညှိနိုင်သည်။
up plate ၏ အထူးဖွဲ့စည်းပုံဒီဇိုင်းသည် elastic drive ကို ထိရောက်စွာကာကွယ်ပေးရုံသာမက မသင့်လျော်သောလည်ပတ်မှုကြောင့် ပျက်စီးမှုကိုလည်း ရှောင်ရှားနိုင်ပါသည်။
အဆင်ပြေစွာလည်ပတ်နိုင်ရန်အတွက် ဝက်အူချိန်ညှိမှုပါရှိသော အောက်ဘက်ကော်တိုင်ကီ။
အဝေးထိန်းစနစ်ပါရှိသော touch screen နှင့် PLC control system ကို အသုံးပြုထားသည်။ photocell counting နှင့် auto kicker marking system တပ်ဆင်ထားသည်။
ဖိနယ်ကဏ္ဍတွင် လေဖိအားထိန်းချုပ်မှုပါရှိသော အထူးပစ္စည်းကို အသုံးပြုထားသည်။ ပြီးပြည့်စုံသော ထုတ်ကုန်များကို သေချာစေရန် ရေမြှုပ်ခါးပတ် တပ်ဆင်ထားသည်။
လုပ်ဆောင်ချက်အားလုံးကို ဆဋ္ဌဂံသော့ကိရိယာများဖြင့် လုပ်ဆောင်နိုင်ပါသည်။
စက်သည် ပထမနှင့် တတိယခေါက်များကို ကြိုတင်ခေါက်ခြင်း၊ နှစ်ထပ်နံရံနှင့် အောက်ခြေကို ပြိုကျစေသော ဖြောင့်တန်းသော သေတ္တာများကို ထုတ်လုပ်နိုင်သည်
ကမ္ဘာ့ထိပ်တန်းမိတ်ဖက်နှင့် ပူးပေါင်းဆောင်ရွက်မှုမှတစ်ဆင့် Guowang Group (GW) သည် ဂျာမနီမိတ်ဖက်နှင့် KOMORI ကမ္ဘာလုံးဆိုင်ရာ OEM ပရောဂျက်တို့နှင့်အတူ ဖက်စပ်ကုမ္ပဏီတစ်ခုကို ပိုင်ဆိုင်သည်။ ဂျာမန်နှင့် ဂျပန်ခေတ်မီနည်းပညာနှင့် ၂၅ နှစ်ကျော်အတွေ့အကြုံကို အခြေခံ၍ GW သည် အကောင်းဆုံးနှင့် အထိရောက်ဆုံး post-press ဖြေရှင်းချက်ကို အဆက်မပြတ်ပေးဆောင်လျက်ရှိသည်။
GW သည် သုတေသနနှင့် ဖွံ့ဖြိုးတိုးတက်ရေး၊ ဝယ်ယူခြင်း၊ စက်ယန္တရားပြုလုပ်ခြင်း၊ တပ်ဆင်ခြင်းနှင့် စစ်ဆေးခြင်းမှစ၍ အဆင့်မြင့်ထုတ်လုပ်မှုဖြေရှင်းချက်နှင့် 5S စီမံခန့်ခွဲမှုစံနှုန်းကို လက်ခံကျင့်သုံးပြီး လုပ်ငန်းစဉ်တိုင်းသည် အမြင့်ဆုံးစံနှုန်းကို တင်းကြပ်စွာလိုက်နာသည်။
GW သည် CNC တွင် များစွာရင်းနှီးမြှုပ်နှံထားပြီး ကမ္ဘာတစ်ဝှမ်းမှ DMG၊ INNSE- BERADI၊ PAMA၊ STARRAG၊ TOSHIBA၊ OKUMA၊ MAZAK၊ MITSUBISHI စသည်တို့ကို တင်သွင်းပါသည်။ အဘယ်ကြောင့်ဆိုသော် အရည်အသွေးမြင့်မားမှုကို လိုက်စားသောကြောင့်ဖြစ်သည်။ ခိုင်မာသော CNC အဖွဲ့သည် သင့်ထုတ်ကုန်များ၏ အရည်အသွေးအတွက် ခိုင်မာသောအာမခံချက်ဖြစ်သည်။ GW တွင် သင်သည် “မြင့်မားသောစွမ်းဆောင်ရည်နှင့် မြင့်မားသောတိကျမှု” ကို ခံစားရလိမ့်မည်။

