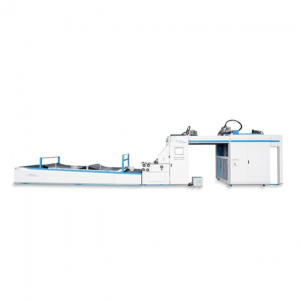
EUFMPro အလိုအလျောက် မြန်နှုန်းမြင့် ပလွေ ඔප දැමීම စက်
EUFM စီးရီး ပလွေ လမီနိတ်တာ။ စာရွက်အရွယ်အစား သုံးမျိုးနဲ့ ထွက်ရှိလာပါတယ်။
၁၅၀၀*၁၅၀၀မီလီမီတာ ၁၇၀၀*၁၇၀၀မီလီမီတာ ၁၉၀၀*၁၉၀၀မီလီမီတာ
လုပ်ဆောင်ချက်:
စက္ကူကို ပစ္စည်း၏ခိုင်ခံ့မှုနှင့်အထူကို မြှင့်တင်ရန် သို့မဟုတ် အထူးပြုလုပ်ချက်များ ပြုလုပ်ရန် စက္ကူပြားဖြင့် ಲೇಪನ್ಯಾನುವಿಸနိုင်သည်။ ဖြတ်တောက်ပြီးနောက် ၎င်းကိုထုပ်ပိုးသေတ္တာများ၊ ကြော်ငြာဆိုင်းဘုတ်များနှင့် အခြားရည်ရွယ်ချက်များအတွက် အသုံးပြုနိုင်သည်။
ဖွဲ့စည်းပုံ:
အပေါ်စာရွက်ထည့်သည့်ကိရိယာ- အပေါ်မှ 120-800gsm စက္ကူအထပ်လိုက်ကို ပို့နိုင်သည်။
အောက်ခြေစာရွက်ထည့်စက်- ၎င်းသည် အောက်ဘက်မှ ၀.၅ မှ ၁၀ မီလီမီတာရှိသော රැමීම/စက္ကူပြားကို ပို့နိုင်သည်။
ကော်ကပ်ယန္တရား- ကော်ကပ်ထားသောရေကို စက္ကူပေါ်တွင် ကပ်နိုင်သည်။ ကော်ရိုလာသည် သံမဏိဖြစ်သည်။
စံကိုက်ညှိဖွဲ့စည်းပုံ- သတ်မှတ်ထားသော ခံနိုင်ရည်များအလိုက် စက္ကူနှစ်ခုနှင့် ကိုက်ညီစေသည်။
ဖိအားပေး သယ်ယူပို့ဆောင်ရေး- ပူးတွဲပါ စက္ကူကို ဖိပြီး ပို့ဆောင်ရေးဌာနသို့ ပို့ဆောင်ပေးသည်။
ဤထုတ်ကုန်စီးရီး၏ frame များအားလုံးကို ကြီးမားသော machined center မှ တစ်ပြိုင်နက်တည်း လုပ်ဆောင်ပြီး station တစ်ခုစီ၏ တိကျမှုကို သေချာစေပြီး ပစ္စည်းကိရိယာများ၏ ပိုမိုတည်ငြိမ်သော လည်ပတ်မှုကို သေချာစေသည်။
အခြေခံမူများ-
အပေါ်ဆုံးစာရွက်ကို အပေါ်ပိုင်း feeder မှ ပေးပို့ပြီး positioning device ၏ start detector သို့ ပေးပို့သည်။ ထို့နောက် အောက်ဆုံးစာရွက်ကို ပေးပို့သည်။ အောက်ဆုံးစက္ကူကို ကော်ဖြင့် ဖုံးအုပ်ပြီးနောက် အပေါ်ဆုံးစက္ကူနှင့် အောက်ဆုံးစက္ကူကို နှစ်ဖက်စလုံးရှိ synchronous detectors များထံ အသီးသီး ပို့ဆောင်ပေးသည်။ ထောက်လှမ်းပြီးနောက် controller သည် အပေါ်နှင့်အောက်ဆုံးစာရွက်၏ အမှားအယွင်းတန်ဖိုးကို တွက်ချက်ပြီး စက္ကူ၏ နှစ်ဖက်စလုံးရှိ servo compensation device သည် splicing အတွက် ကြိုတင်သတ်မှတ်ထားသော အနေအထားသို့ စက္ကူကို ချိန်ညှိပြီးနောက် သယ်ယူပို့ဆောင်ခြင်းကို ဖိအားပေးသည်။ စက်သည် စက္ကူကို ဖိပြီး အပြီးသတ်ထုတ်ကုန်ကို စုဆောင်းရန် ပို့ဆောင်ရေးစက်သို့ ပို့ဆောင်သည်။
လမိုင်းနိတ်လုပ်ရန် သက်ဆိုင်သောပစ္စည်းများ-
ကပ်စက္ကူ --- 120 ~ 800g/m2 အပါးစက္ကူ၊ ကတ်ထူပြား။
အောက်ခြေစက္ကူ---≤10mm ಲೇಪಿಸ ...
ကော် - ကော်မှုန့်၊ စသည်တို့ကို PH တန်ဖိုး ၆ ~ ၈ အကြားတွင် ကပ်နိုင်သည်။
ဖွဲ့စည်းပုံဆိုင်ရာ အင်္ဂါရပ်များ-
ကမ္ဘာ့ဦးဆောင် ဂီယာထိန်းချုပ်မှုစနစ်ကို လက်ခံကျင့်သုံးခြင်းဖြင့် ထည့်သွင်းသည့် စက္ကူအရွယ်အစားနှင့် စနစ်သည် အလိုအလျောက် ချိန်ညှိပေးမည်ဖြစ်သည်။
တစ်နာရီလျှင် အပိုင်း ၂၀,၀၀၀ အထိ ကွန်ပျူတာစနစ်ဖြင့် မြန်နှုန်းမြင့် လမိုင်းနိတ်ပြုလုပ်ခြင်း။
ရှေ့သို့ နှုတ်သီးလေးစုံနှင့် စုပ်ယူနှုတ်သီးလေးစုံပါရှိသော စီးကြောင်းအမျိုးအစား လေထောက်ပံ့ခေါင်း။
Feed Block သည် စက္ကူကို pallet တွင် တပ်ဆင်နိုင်ပြီး track-assisted pre-stacker ကို တပ်ဆင်နိုင်သည်။
အောက်ခြေမျဉ်း၏ ရှေ့သို့ဦးတည်နေသော အနေအထားကို ထောက်လှမ်းရန် လျှပ်စစ်မျက်လုံးအစုံများစွာကို အသုံးပြုပြီး အပေါ်နှင့်အောက် စက္ကူချိန်ညှိမှုကို တိကျပြီး ချောမွေ့စေရန် မျက်နှာပြင်စက္ကူ၏ နှစ်ဖက်စလုံးရှိ servo မော်တာကို သီးခြားစီလည်ပတ်စေပါ။
လူ့-စက် မျက်နှာပြင်နှင့် PLC ပရိုဂရမ် မော်ဒယ် မျက်နှာပြင်ကို အသုံးပြုသည့် လုပ်ဆောင်ချက် အပြည့်အဝပါသည့် အီလက်ထရွန်းနစ် ထိန်းချုပ်မှုစနစ်သည် လည်ပတ်မှု အခြေအနေများနှင့် အလုပ်မှတ်တမ်းများကို အလိုအလျောက် ထောက်လှမ်းနိုင်သည်။
အလိုအလျောက်ကော်ပြန်လည်ဖြည့်တင်းစနစ်သည် ဆုံးရှုံးသွားသောကော်ကို အလိုအလျောက်ပြန်လည်ဖြည့်တင်းပေးနိုင်ပြီး ကော်ပြန်လည်အသုံးပြုခြင်းနှင့် ပူးပေါင်းဆောင်ရွက်နိုင်သည်။
EUFM မြန်နှုန်းမြင့် လမီနိတ်စက်ကို လုပ်အားခ သက်သာစေရန်အတွက် အလိုအလျောက် ဖလစ်ဖလော့ စတာကာနှင့် ချိတ်ဆက်နိုင်သည်။
| မော်ဒယ် | EUFM1500ပရို | EUFM1700ပရို | EUFM1900ပရို |
| အများဆုံးအရွယ်အစား | ၁၅၀၀*၁၅၀၀ မီလီမီတာ | ၁၇၀၀*၁၇၀၀ မီလီမီတာ | ၁၉၀၀*၁၉၀၀ မီလီမီတာ |
| အနည်းဆုံး အရွယ်အစား | ၃၆၀*၃၈၀ မီလီမီတာ | ၃၆၀*၄၀၀ မီလီမီတာ | ၅၀၀*၅၀၀ မီလီမီတာ |
| စက္ကူ | ၁၂၀-၈၀၀ ဂရမ် | ၁၂၀-၈၀၀ ဂရမ် | ၁၂၀-၈၀၀ ဂရမ် |
| အောက်ခြေစက္ကူ | ≤10mm ABCDEF လှိုင်းတွန့်ဘုတ် ≥300gsm ကတ်ထူပြား | ≤10mm ABCDEF လှိုင်းတွန့်ဘုတ် ≥300gsm ကတ်ထူပြား | ≤၁၀ မီလီမီတာ ABCDEF လှိုင်းတွန့်ဘုတ် ≥300gsm ကတ်ထူပြား |
| အများဆုံး lamination မြန်နှုန်း | ၁၈၀ မီတာ/မိနစ် | ၁၈၀ မီတာ/မိနစ် | ၁၈၀ မီတာ/မိနစ် |
| ပါဝါ | ၂၂ ကီလိုဝပ် | ၂၅ ကီလိုဝပ် | ၂၇၀ ကီလိုဝပ် |
| တုတ်တိကျမှု | ±၁ မီလီမီတာ | ±၁ မီလီမီတာ | ±၁ မီလီမီတာ |
၁။ အောက်ခြေစာရွက်ကျွေးခြင်း

တင်သွင်းလာသော Servo မော်တာလျှပ်စစ်ထိန်းချုပ်စနစ်ကို အသုံးပြုထားပြီး၊ ဂျပန် NITTA စုပ်စက်ခါးပတ်ဖြင့် စုပ်စက်ပါဝါအင်ဗာတာပြုလုပ်ကာ ရေရိုလာဖြင့် ခါးပတ်ကို သန့်စင်ပေးပါသည်။
ကွေးညွှတ်စက္ကူနှင့် ကတ်ထူပြားများ ချောမွေ့စွာ လည်ပတ်နိုင်စေရန် မူပိုင်ခွင့်ရ နည်းပညာ။
၂။ အပေါ်ဆုံးစာရွက်ကျွေးခြင်းယန္တရား


မြန်နှုန်းမြင့် အော်တို သီးသန့် စက္ကူထည့်စက်၏ စက္ကူမြှောက်ခြင်းနှင့် စက္ကူထည့်ခြင်း နော်ဇယ် နှစ်ခုလုံးကို ပါးလွှာသော စက္ကူနှင့် ထူထဲသော စက္ကူနှစ်မျိုးလုံးအတွက် လိုက်လျောညီထွေဖြစ်အောင် လွတ်လပ်စွာ ချိန်ညှိနိုင်သည်။ Becker ပန့်နှင့်အတူ အပေါ်မှ စက္ကူများကို မြန်ဆန်စွာနှင့် ချောမွေ့စွာ လည်ပတ်နိုင်စေရန် သေချာစေသည်။
၃။ လျှပ်စစ်စနစ်



စက်ကို အမြင့်ဆုံးအမြန်နှုန်းနှင့် တိကျမှုဖြင့် ပရီမီယံစွမ်းဆောင်ရည်နှင့် လည်ပတ်မှုတည်ငြိမ်မှုအဖြစ် သေချာစေရန် Yaskawa Servo စနစ်နှင့် inverter၊ Siemens PLC တို့နှင့်အတူ ရွေ့လျားမှုထိန်းချုပ်ကိရိယာကို ဒီဇိုင်းထုတ်ပြီး အသုံးပြုထားသည်။ လူ-စက်မျက်နှာပြင်နှင့် PLC ပေါင်းစပ်မှုကို အသုံးပြု၍ မျက်နှာပြင်ပေါ်တွင် အချက်အလက်အားလုံးကို ပြသပေးသည်။ အမှာစာမှတ်ဉာဏ်လုပ်ဆောင်ချက်၊ ယခင်အမှာစာကို လွှဲပြောင်းရန် တစ်ချက်နှိပ်ရုံဖြင့် အဆင်ပြေပြီး မြန်ဆန်သည်။
၄။ ကြိုတင်စီထားသော အပိုင်း

ကြိုတင်သတ်မှတ်ထားသော လုပ်ဆောင်ချက်ပါရှိသော Pre-pile စနစ်ကို touch screen မှတစ်ဆင့် စက္ကူအရွယ်အစားအဖြစ် သတ်မှတ်နိုင်ပြီး အလိုအလျောက် ဦးတည်ချက်ထားနိုင်သောကြောင့် တပ်ဆင်ချိန်ကို ထိရောက်စွာ လျှော့ချနိုင်ပါသည်။
၅။ ဂီယာစနစ်



တည်ငြိမ်မှုကိုသေချာစေရန်အတွက် SKF bearing နှင့်အတူ Gates synchronical belt ကို အဓိကဂီယာအဖြစ် အသုံးပြုထားသည်။ ဖိအား roller များ၊ dampening roller နှင့် ကော်တန်ဖိုး နှစ်မျိုးလုံးကို စက်ပိုင်းဆိုင်ရာ encoder ပါသော လက်ကိုင်ဖြင့် အလွယ်တကူ ချိန်ညှိနိုင်သည်။
၆။ နေရာချထားမှုစနစ်

ရွေ့လျားမှုထိန်းချုပ်မှုနှင့် Yaskawa Servo စနစ်တို့နှင့်အတူ Photocell သည် အပေါ်နှင့်အောက်စက္ကူ၏ ဦးတည်ချက်တိကျမှုကို သေချာစေသည်။ အနည်းဆုံးကော်ပမာဏတွင်ပင် ကော်အလွှာညီညာစေရန်အတွက် ကောင်းမွန်သော anilox ကြိတ်ခွဲသည့် stainless steel ကော်ရိုလာ။
၇။ ကော်စနစ်



ကော်ဖြန်းဆေးနည်းပါးစွာဖြင့် စက်ကိုပိုမိုမြန်ဆန်စွာလည်ပတ်နိုင်စေရန် 150mm pressing roller ပါရှိသော အလွန်ကြီးမားသော 160mm အချင်း anilox roller နှင့် Teflon press roller တို့သည် ကော်ချောင်း၏သန့်ရှင်းရေးကို ထိရောက်စွာလျှော့ချပေးပါသည်။ ကော်အပေါ်ယံတန်ဖိုးကို touch screen တွင် သတ်မှတ်နိုင်ပြီး servo motor ဖြင့် တိကျစွာထိန်းချုပ်နိုင်ပါသည်။
၈။ ထိတွေ့မျက်နှာပြင်နှင့် အလိုအလျောက် ဦးတည်ချက်



စက္ကူဖော်မတ်ကို ၁၅ လက်မ Touch Monitor မှတစ်ဆင့် သတ်မှတ်နိုင်ပြီး inverter motor မှတစ်ဆင့် အလိုအလျောက် ဦးတည်ချက်ပေးခြင်းဖြင့် စနစ်ထည့်သွင်းချိန်ကို လျှော့ချနိုင်သည်။ Auto orientation ကို pre-pile unit၊ top feeding unit၊ bottom feeding unit နှင့် positioning unit တို့တွင် အသုံးပြုသည်။ Eaton M22 series ခလုတ်သည် ကြာရှည်စွာ အလုပ်လုပ်နိုင်ပြီး စက်၏ အလှအပကို သေချာစေသည်။
၉။ အထူချိန်ညှိမှု

ထောက်လှမ်းတွေ့ရှိထားသော တန်ဖိုးအရ ရိုလာကွာဟချက်ကို အလိုအလျောက် ချိန်ညှိနိုင်သည်။
၁၀။ ကွန်ဗေယာ

စက္ကူထုတ်ယူရာတွင် လွယ်ကူချောမွေ့စေရန် မြှင့်တင်ထားသော သယ်ယူပို့ဆောင်ရေးယူနစ်။ ဖိအားခါးပတ်နှင့်အတူ ရှည်လျားသော သယ်ယူပို့ဆောင်ရေးယူနစ်သည် စက္ကူများကို ထုတ်ယူရာတွင် လွယ်ကူချောမွေ့စေသည်။ အလွှာပါးဖြင့်ပြုလုပ်ထားသော စာရွက်များကို လျင်မြန်စွာ ခြောက်သွေ့စေရန်အတွက် ဖိအားခါးပတ်ပါရှိသည်။
၁၁။ အလိုအလျောက် ချောဆီစနစ်

အဓိက bearing အားလုံးအတွက် အလိုအလျောက် ချောဆီဖြည့်စုပ်စက်သည် လေးလံသောလုပ်ငန်းခွင်အခြေအနေတွင်ပင် စက်၏ခံနိုင်ရည်ကို သေချာစေသည်။
၁။ ဦးဆောင်အဆင့်မြင့် အစာကျွေးစနစ်

ခဲအနားကွပ်ကြောင့် အလွှာ ၅ လွှာ သို့မဟုတ် ၇ လွှာကဲ့သို့သော ထူထဲသော ಲೇಪಿಸ ...
၂။ ရှပ်လက်မဲ့ ဆာဗို ကျွေးစက်

ပျော့ပျောင်းသောရွေ့လျားမှုတွင် အလွန်ရှည်လျားသောစာရွက်အတွက် Shaftless servo feeder ကို အသုံးပြုသည်။
၃။ အပိုလုံခြုံရေးအစောင့်နှင့် လုံခြုံရေးရီလေး




နောက်ထပ်ဘေးကင်းရေးအကူအညီအတွက် စက်ပတ်လည်တွင် အပိုပိတ်ထားသောအဖုံး။ တံခါးခလုတ်နှင့် E-stop မလိုအပ်ဘဲလုပ်ဆောင်နိုင်စေရန် လုံခြုံရေးရီလေး။
| စီးရီး | အပိုင်း | နိုင်ငံ | အမှတ်တံဆိပ် |
| ၁ | အဓိကမော်တာ | ဂျာမနီ | ဆီမီးယမ်စ် |
| 2 | ဖန်ပြင်ကိုတို့ပြီးအသုံးပြုရခြင်း | ထိုင်ဝမ် | ဝိန်းဗျူး |
| 3 | ဆာဗိုမော်တာ | ဂျပန် | Yaskawa |
| 4 | လိုင်းယာလမ်းညွှန်ဆလိုက်နှင့် လမ်းညွှန်ရထားလမ်း | ထိုင်ဝမ် | ဟိုင်ဝင်း |
| 5 | စက္ကူအမြန်နှုန်းလျှော့ချစက် | ဂျာမနီ | ဆီမီးယမ်စ် |
| 6 | ဆိုလီနွိုက် နောက်ပြန်လှည့်ခြင်း | ဂျပန် | SMC |
| 7 | ရှေ့နှင့်နောက် မော်တာကို နှိပ်ပါ | ထိုင်ဝမ် | Shanteng |
| 8 | ဖိမော်တာ | ဂျာမနီ | ဆီမီးယမ်စ် |
| 9 | အဓိကအင်ဂျင်အကျယ်ချိန်ညှိမော်တာ | ထိုင်ဝမ် | CPG |
| 10 | အစာကျွေးအကျယ်မော်တာ | ထိုင်ဝမ် | CPG |
| 11 | အစာကျွေးမော်တာ | ထိုင်ဝမ် | လိုက်ဒ် |
| 12 | ဖုန်စုပ်ဖိအားစုပ်စက် | ဂျာမနီ | ဘက်ကာ |
| 13 | ကွင်းဆက် | ဂျပန် | TSUBAKI |
| 14 | ရီလေး | ဂျပန် | အွမ်ရွန် |
| 15 | optoelectronic switch | ထိုင်ဝမ် | FOTEK |
| 16 | solid-state relay | ထိုင်ဝမ် | FOTEK |
| 17 | ပရိုမစ်စီတီ ခလုတ်များ | ဂျပန် | အွမ်ရွန် |
| 18 | ရေအဆင့် ရီလေး | ထိုင်ဝမ် | FOTEK |
| 19 | ကွန်တက်တာ | ပြင်သစ် | ရှနိုက်ဒါ |
| 20 | ပီအယ်လ်စီ | ဂျာမနီ | ဆီမီးယမ်စ် |
| 21 | ဆာဗိုဒရိုက်ဘာများ | ဂျပန် | Yaskawa |
| 22 | ကြိမ်နှုန်းပြောင်းစက် | ဂျပန် | Yaskawa |
| 23 | ပိုတင်တီအိုမီတာ | ဂျပန် | တိုကို့စ် |
| 24 | ကုဒ်ဒါ | ဂျပန် | အွမ်ရွန် |
| 25 | ခလုတ် | ပြင်သစ် | ရှနိုက်ဒါ |
| 26 | ဘရိတ်ခုခံအား | ထိုင်ဝမ် | တေအီး |
| 27 | Solid-state relay | ထိုင်ဝမ် | FOTEK |
| 28 | လေခလုတ် | ပြင်သစ် | ရှနိုက်ဒါ |
| 29 | သာမိုရီလေး | ပြင်သစ် | ရှနိုက်ဒါ |
| 30 | ဒီစီ ဓာတ်အားစနစ် | ထိုင်ဝမ် | မင်းဝေ |