








EUFM အလိုအလျောက် မြန်နှုန်းမြင့် ပလွေ လမိုင်းစက်
စက္ကူကို ပစ္စည်း၏ခိုင်ခံ့မှုနှင့်အထူကို မြှင့်တင်ရန် သို့မဟုတ် အထူးပြုလုပ်ချက်များ ပြုလုပ်ရန် စက္ကူပြားဖြင့် ಲೇಪನ್ಯಾನುವಿಸနိုင်သည်။ ဖြတ်တောက်ပြီးနောက် ၎င်းကိုထုပ်ပိုးသေတ္တာများ၊ ကြော်ငြာဆိုင်းဘုတ်များနှင့် အခြားရည်ရွယ်ချက်များအတွက် အသုံးပြုနိုင်သည်။
| မော်ဒယ် | EUFM1450 | EUFM1650 | EUFM1900 |
| အများဆုံးအရွယ်အစား | ၁၄၅၀*၁၄၅၀ မီလီမီတာ | ၁၆၅၀*၁၆၅၀ မီလီမီတာ | ၁၉၀၀*၁၉၀၀ မီလီမီတာ |
| အနည်းဆုံး အရွယ်အစား | ၃၈၀*၄၀၀ မီလီမီတာ | ၄၀၀*၄၅၀ မီလီမီတာ | ၄၅၀*၄၅၀ မီလီမီတာ |
| စက္ကူ | ၁၂၀-၈၀၀ ဂရမ် | ၁၂၀-၈၀၀ ဂရမ် | ၁၂၀-၈၀၀ ဂရမ် |
| အောက်ခြေစက္ကူ | ≤10mm ABCDEF လှိုင်းတွန့်ဘုတ် ≥300gsm ကတ်ထူပြား | ≤10mm ABCDEF လှိုင်းတွန့်ဘုတ် ≥300gsm ကတ်ထူပြား | ≤၁၀ မီလီမီတာ ABCDEF လှိုင်းတွန့်ဘုတ် ≥300gsm ကတ်ထူပြား |
| အများဆုံး lamination မြန်နှုန်း | ၁၅၀ မီတာ/မိနစ် | ၁၅၀ မီတာ/မိနစ် | ၁၅၀ မီတာ/မိနစ် |
| ပါဝါ | ၂၅ ကီလိုဝပ် | ၂၇ ကီလိုဝပ် | ၃၀ ကီလိုဝပ် |
| တုတ်တိကျမှု | ±၁.၅ မီလီမီတာ | ±၁.၅ မီလီမီတာ | ±၁.၅ မီလီမီတာ |
၁။ အောက်ခြေစာရွက်ကျွေးခြင်း

တင်သွင်းလာသော Servo မော်တာလျှပ်စစ်ထိန်းချုပ်စနစ်ကို အသုံးပြုထားပြီး၊ ဂျပန် NITTA စုပ်ယူမှုခါးပတ်ဖြင့် စုပ်ယူမှုပါဝါအင်ဗာတာပြုလုပ်ကာ၊ ရေရိုလာဖြင့် ခါးပတ်ကို သန့်ရှင်းရေးလုပ်သည်။ ကွေးကောက်စက္ကူနှင့် ကတ်ထူပြားများ ချောမွေ့စွာထွက်ရှိစေရန်နှင့် ရိုးရှင်းစွာလည်ပတ်နိုင်စေရန် မူပိုင်ခွင့်ရနည်းပညာ။
၂။ အပေါ်ဆုံးစာရွက်ကျွေးခြင်းယန္တရား

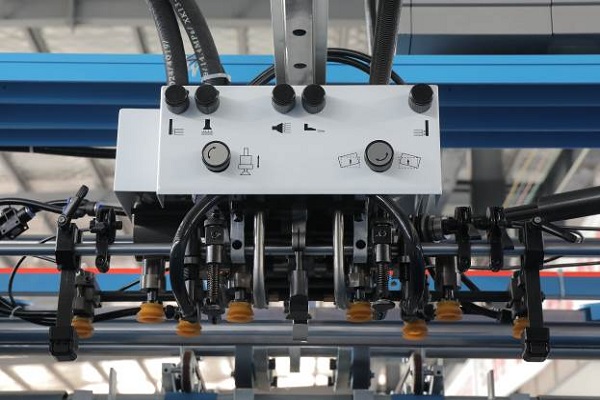
မြန်နှုန်းမြင့် အော်တို သီးသန့် စက္ကူထည့်စက်၏ စက္ကူမြှောက်ခြင်းနှင့် စက္ကူထည့်ခြင်း နော်ဇယ် နှစ်ခုလုံးကို ပါးလွှာသော စက္ကူနှင့် ထူထဲသော စက္ကူနှစ်မျိုးလုံးအတွက် လိုက်လျောညီထွေဖြစ်အောင် လွတ်လပ်စွာ ချိန်ညှိနိုင်သည်။ Becker ပန့်နှင့်အတူ အပေါ်မှ စက္ကူများကို မြန်ဆန်စွာနှင့် ချောမွေ့စွာ လည်ပတ်နိုင်စေရန် သေချာစေသည်။
၃။ လျှပ်စစ်စနစ်



စက်ကို အမြင့်ဆုံးအမြန်နှုန်းနှင့် တိကျမှုဖြင့် လည်ပတ်နိုင်စေရန်အတွက် ပရီမီယံစွမ်းဆောင်ရည်နှင့် လည်ပတ်မှုတည်ငြိမ်မှုအဖြစ် သေချာစေရန် Yaskawa Servo စနစ်နှင့် အင်ဗာတာ၊ Siemens PLC တို့နှင့်အတူ USA Parker ရွေ့လျားမှုထိန်းချုပ်ကိရိယာကို ဒီဇိုင်းထုတ်ပြီး အသုံးပြုပါသည်။
၄။ ကြိုတင်စီထားသော အပိုင်း

ကြိုတင်သတ်မှတ်ထားသော လုပ်ဆောင်ချက်ပါရှိသော Pre-pile စနစ်ကို touch screen မှတစ်ဆင့် စက္ကူအရွယ်အစားအဖြစ် သတ်မှတ်နိုင်ပြီး အလိုအလျောက် ဦးတည်ချက်ထားနိုင်သောကြောင့် တပ်ဆင်ချိန်ကို ထိရောက်စွာ လျှော့ချနိုင်ပါသည်။
၅။ ဂီယာစနစ်
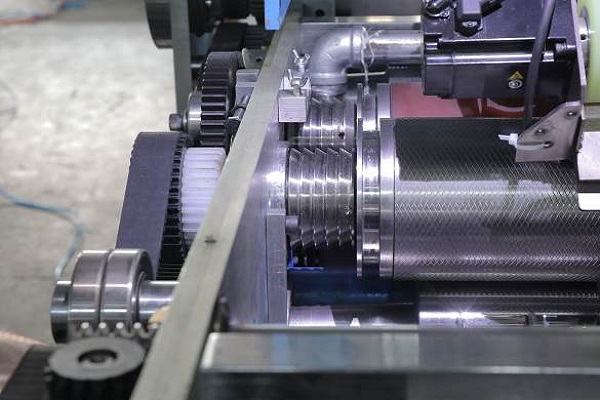

တည်ငြိမ်မှုကိုသေချာစေရန်အတွက် SKF bearing နှင့်အတူ Gates synchronical belt ကို အဓိကဂီယာအဖြစ် အသုံးပြုထားသည်။ ဖိအား roller များ၊ dampening roller နှင့် ကော်တန်ဖိုး နှစ်မျိုးလုံးကို စက်ပိုင်းဆိုင်ရာ encoder ပါသော လက်ကိုင်ဖြင့် အလွယ်တကူ ချိန်ညှိနိုင်သည်။
၆။ နေရာချထားမှုစနစ်
Parker Dynamic မော်ဂျူးနှင့် Yaskawa Servo စနစ်တို့နှင့်အတူ Photocell သည် အပေါ်နှင့်အောက် စက္ကူ၏ ဦးတည်ချက်တိကျမှုကို သေချာစေသည်။ အနည်းဆုံး ကော်ပမာဏတွင်ပင် ကော်အလွှာညီညာစေရန်အတွက် ကောင်းမွန်သော anilox ကြိတ်ခွဲသည့် stainless steel ကော်ရိုလာ
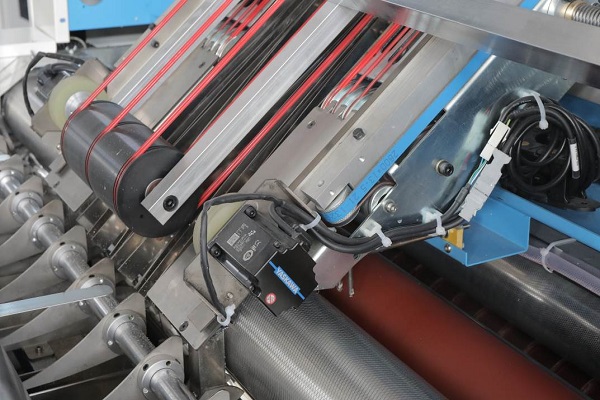
၇။ ထိတွေ့မျက်နှာပြင်နှင့် အလိုအလျောက် ဦးတည်ချက်




စက္ကူဖော်မတ်ကို ၁၅ လက်မ Touch Monitor မှတစ်ဆင့် သတ်မှတ်နိုင်ပြီး inverter motor မှတစ်ဆင့် အလိုအလျောက် ဦးတည်ချက်ပေးခြင်းဖြင့် စနစ်ထည့်သွင်းချိန်ကို လျှော့ချနိုင်သည်။ Auto orientation ကို pre-pile unit၊ top feeding unit၊ bottom feeding unit နှင့် positioning unit တို့တွင် အသုံးပြုသည်။ Eaton M22 series ခလုတ်သည် ကြာရှည်စွာ အလုပ်လုပ်နိုင်ပြီး စက်၏ အလှအပကို သေချာစေသည်။
၈။ ကွန်ဗေယာ

စက္ကူထုတ်ယူရာတွင် လွယ်ကူချောမွေ့စေရန် မြှင့်တင်ထားသော သယ်ယူပို့ဆောင်ရေးယူနစ်။ ဖိအားခါးပတ်နှင့်အတူ ရှည်လျားသော သယ်ယူပို့ဆောင်ရေးယူနစ်သည် စက္ကူများကို ထုတ်ယူရာတွင် လွယ်ကူချောမွေ့စေသည်။ အလွှာပါးဖြင့်ပြုလုပ်ထားသော စာရွက်များကို လျင်မြန်စွာ ခြောက်သွေ့စေရန်အတွက် ဖိအားခါးပတ်ပါရှိသည်။
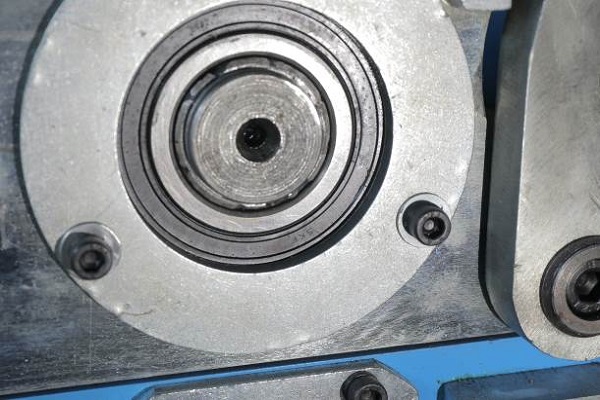
၉။ အလိုအလျောက် ချောဆီစနစ်

အဓိက bearing အားလုံးအတွက် အလိုအလျောက် ချောဆီဖြည့်စုပ်စက်သည် လေးလံသောလုပ်ငန်းခွင်အခြေအနေတွင်ပင် စက်၏ခံနိုင်ရည်ကို သေချာစေသည်။
ရွေးချယ်စရာများ-
၁။ ဦးဆောင်အဆင့်မြင့် အစာကျွေးစနစ်

ခဲအနားကွပ်ကြောင့် အလွှာ ၅ လွှာ သို့မဟုတ် ၇ လွှာကဲ့သို့သော ထူထဲသော ಲೇಪಿಸ ...
၂။ ရှပ်လက်မဲ့ ဆာဗို ကျွေးစက်

ပျော့ပျောင်းသောရွေ့လျားမှုတွင် အလွန်ရှည်လျားသောစာရွက်အတွက် Shaftless servo feeder ကို အသုံးပြုသည်။
၃။ အပိုလုံခြုံရေးအစောင့်နှင့် လုံခြုံရေးရီလေး




နောက်ထပ်ဘေးကင်းရေးအကူအညီအတွက် စက်ပတ်လည်တွင် အပိုပိတ်ထားသောအဖုံး။ တံခါးခလုတ်နှင့် E-stop မလိုအပ်ဘဲလုပ်ဆောင်နိုင်စေရန် လုံခြုံရေးရီလေး။

