




















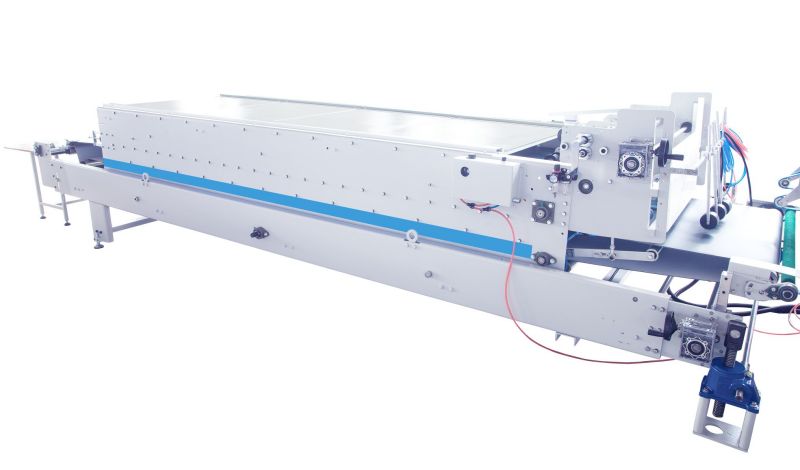
EF-2200S မြန်နှုန်းမြင့် အလိုအလျောက် နှစ်ပိုင်းတွဲ ဖိုင်တွဲကော်စက်



၁) အစာကျွေးခြင်းကဏ္ဍ
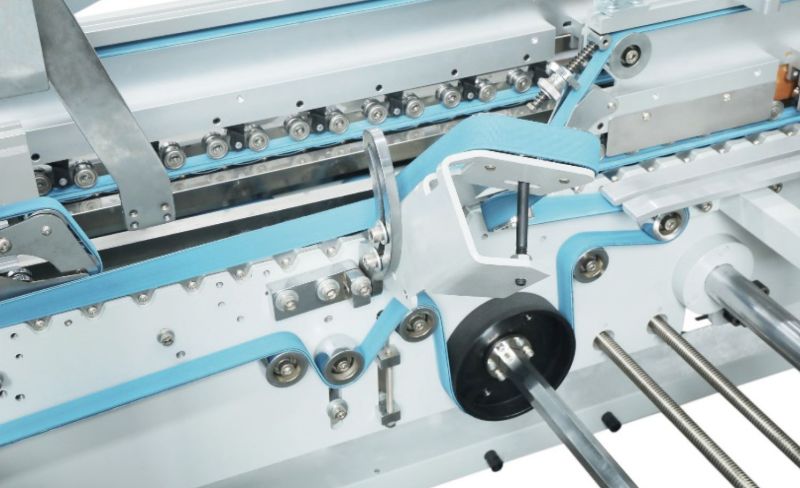
Folder gluer အစာကျွေးသည့်အပိုင်းကို ထိန်းချုပ်ကိရိယာပါရှိသော သီးခြား AC မော်တာ၊ ကျယ်သောခါးပတ်များ၊ knurl roller များနှင့် vibrator များဖြင့် ချောမွေ့ပြီး တိကျသောအမြန်နှုန်းချိန်ညှိမှုအတွက် မောင်းနှင်သည်။ စက္ကူအကျယ်အလိုက် ဘယ်နှင့်ညာ ထူထဲသောသတ္တုပြားများကို အလွယ်တကူရွှေ့နိုင်သည်။ အစာကျွေးဓားသုံးချောင်းသည် စက္ကူအရှည်အလိုက် အစာကျွေးသည့်အရွယ်အစားကို ချိန်ညှိနိုင်သည်။ မော်တာနှင့်ပူးပေါင်း၍ ဖုန်စုပ်စက်မှ စုပ်ယူသည့်ခါးပတ်များသည် အစာကျွေးခြင်းကို စဉ်ဆက်မပြတ်နှင့် တည်ငြိမ်စေသည်။ အမြင့် ၄၀၀ မီလီမီတာအထိ စုပုံနိုင်သည်။ တုန်ခါမှုသည် စက်၏ မည်သည့်နေရာတွင်မဆို အဝေးထိန်းခလုတ်ဖြင့် လုပ်ဆောင်နိုင်သည်။
၂) စက္ကူဘေးဘက် ချိန်ညှိမှုအပိုင်း
ဖိုဒါကော်စက်၏ ချိန်ညှိမှုအပိုင်းသည် သုံးခုတွဲ သယ်ဆောင်သည့်ဖွဲ့စည်းပုံဖြစ်ပြီး၊ ချိန်ညှိရန်အတွက် တွန်းဘက်နည်းလမ်းကို အသုံးပြုထားပြီး စက္ကူကို တည်ငြိမ်စွာလည်ပတ်ခြင်းဖြင့် တိကျသောနေရာသို့ လမ်းညွှန်ပေးသည်။
၃) ကြိုပြီး ခေါက်သိမ်းတဲ့ အပိုင်း (*ရွေးချယ်နိုင်သည်)
ခေါက်ခြင်းမပြုမီ၊ ချိန်ညှိမှုအပိုင်းပြီးနောက် တပ်ဆင်ထားသော သီးခြားစီ မောင်းနှင်သည့် ရမှတ်ပေးအပိုင်း၊ ရေတိမ်သော ရမှတ်ပေးမျဉ်းများကို ပိုမိုနက်ရှိုင်းစေပြီး ခေါက်ခြင်းနှင့် ကော်ကပ်ခြင်း အရည်အသွေးကို မြှင့်တင်ပေးသည်။
၄) ခေါက်ခြင်းမပြုမီ အပိုင်း (*PC)
အထူးဒီဇိုင်းက ပထမခေါက်မျဉ်းကို ၁၈၀ ဒီဂရီနဲ့ တတိယမျဉ်းကို ၁၃၅ ဒီဂရီ ကြိုတင်ခေါက်နိုင်တာကြောင့် ကျွန်တော်တို့ရဲ့ ဖိုင်တွဲကော်စက်မှာ သေတ္တာကို ဖွင့်ရလွယ်ကူစေပါတယ်။
၅) အောက်ခြေရှိ မတော်တဆမှုလော့ခ်ချခြင်း
ကျွန်ုပ်တို့၏ EF စီးရီး ခေါက်ကော်စက်၏ Crasg lock အောက်ခြေသည် သယ်ဆောင်ကိရိယာသုံးခုပါသောဖွဲ့စည်းပုံဖြစ်ပြီး အပေါ်ဘက်ခါးပတ်ဂီယာ၊ ပိုကျယ်သောအောက်ဘက်ခါးပတ်များသည် တည်ငြိမ်ပြီး ချောမွေ့သောစက္ကူသယ်ယူပို့ဆောင်မှုကိုသေချာစေသည်။ ပုံမှန်နှင့်မမှန်သောသေတ္တာအမျိုးမျိုးနှင့်ကိုက်ညီစေရန်ဆက်စပ်ပစ္စည်းများပါ ၀ င်သောပြီးပြည့်စုံသောချိတ်ကိရိယာများ။ အပေါ်ဘက်ခါးပတ်သယ်ဆောင်ကိရိယာများကိုမတူညီသောအထူပစ္စည်းများနှင့်ကိုက်ညီစေရန်လေဖိအားကိရိယာဖြင့်မြှောက်နိုင်သည်။
အောက်ပိုင်းကော်ကပ်ကိရိယာများ (ဘယ်နှင့်ညာ)၊ ကော်ပမာဏကို ချိန်ညှိနိုင်သော ဘီးအမျိုးမျိုး၊ ကော်အထူအမျိုးမျိုး၊ ပြုပြင်ထိန်းသိမ်းမှုလွယ်ကူသည်။
၆) ၄/၆ ထောင့်အပိုင်း (*PCW):
ဉာဏ်ရည်ထက်မြက်သော servo-motor နည်းပညာပါရှိသော ၄/၆ ထောင့်ခေါက်စနစ်။ အီလက်ထရွန်းနစ်နည်းဖြင့် ထိန်းချုပ်ထားသော သီးခြားရိုးတံနှစ်ခုတွင် တပ်ဆင်ထားသော ချိတ်များဖြင့် နောက်ဘက်အဖုံးအားလုံးကို တိကျစွာခေါက်နိုင်သည်။
4/6 ထောင့်သေတ္တာအတွက် Servo စနစ်နှင့် အစိတ်အပိုင်းများ
ရွေ့လျားမှုမော်ဂျူးပါရှိသော Yasakawa servo စနစ်သည် မြန်နှုန်းမြင့်တောင်းဆိုမှုနှင့် ကိုက်ညီစေရန် မြန်နှုန်းမြင့်တုံ့ပြန်မှုကို သေချာစေသည်
လွတ်လပ်သော ထိတွေ့မျက်နှာပြင်သည် ကျွန်ုပ်တို့၏ ဖိုင်တွဲကော်စက်တွင် ချိန်ညှိမှုကို လွယ်ကူချောမွေ့စေပြီး လုပ်ဆောင်ချက်ကို ပိုမိုပြောင်းလွယ်ပြင်လွယ်ရှိစေပါသည်။


၇) နောက်ဆုံးခေါက်ခြင်း:
စက္ကူဘုတ်တွင် နေရာအလုံအလောက်ရှိစေရန်အတွက် သယ်ဆောင်ကိရိယာသုံးခုပါသောဖွဲ့စည်းပုံ၊ အထူးအလွန်ရှည်လျားသော ခေါက်သိမ်းသည့်မော်ဂျူး။ ဘယ်ဘက်နှင့်ညာဘက်အပြင်သို့ ခေါက်သိမ်းသည့်ခါးပတ်များကို ဖြောင့်ဖြောင့်ခေါက်ရန်အတွက် မြန်နှုန်းပြောင်းလဲနိုင်သော ထိန်းချုပ်မှုပါရှိသော လွတ်လပ်သောမော်တာများဖြင့် မောင်းနှင်ပြီး ဖိုင်တွဲကော်စက်ပေါ်တွင် "ငါးအမြီး" ဖြစ်စဉ်ကို ရှောင်ရှားရန် ကူညီပေးသည်။
၈) ထရွမ်ဘုန်း
လွတ်လပ်စွာ မောင်းနှင်ခြင်း။ အပေါ်နှင့်အောက် ခါးပတ်များကို ပိုမိုလွယ်ကူစွာ ချိန်ညှိနိုင်ရန်အတွက် ရှေ့နှင့်နောက်သို့ ရွှေ့နိုင်သည်။ စီထားသည့်ပုံစံအမျိုးမျိုးကို လျင်မြန်စွာ ပြောင်းလဲနိုင်သည်။ အလိုအလျောက် ခါးပတ်တင်းအား ချိန်ညှိမှု။ အောက်ခြေသေတ္တာများကို တိကျစွာ ပိတ်ရန်အတွက် ပြေးစက်၊ အမှတ်အသားပြုလုပ်ရန် kicker သို့မဟုတ် inkjet ပါသည့် အလိုအလျောက် counter၊ စက္ကူညှပ်ရှာဖွေစက်တွင် သေတ္တာများကို ပြီးပြည့်စုံသော အခြေအနေဖြစ်စေရန် ဖိရန် pneumatic roller တပ်ဆင်ထားသည်။
၉) ကွန်ဗာတာအပိုင်းကို နှိပ်ခြင်း
အပေါ်နှင့်အောက် သီးခြားမောင်းနှင်မှုဖွဲ့စည်းပုံဖြင့်၊ မတူညီသောသေတ္တာအရှည်နှင့်ကိုက်ညီစေရန် အပေါ်ပိုင်း conveyor ကို ချိန်ညှိရန်အဆင်ပြေသည်။ နူးညံ့ချောမွေ့သောခါးပတ်သည် သေတ္တာပေါ်တွင် ခြစ်ရာများမဖြစ်အောင် ရှောင်ရှားသည်။ ဖိချသည့်အကျိုးသက်ရောက်မှုကို အားကောင်းစေရန် ရွေးချယ်နိုင်သော ရေမြှုပ်ခါးပတ်။ လေဖိအားစနစ်သည် ဟန်ချက်ညီပြီး ပြီးပြည့်စုံသော ဖိချမှုအရည်အသွေးကို သေချာစေသည်။ conveyor အမြန်နှုန်းကို optical sensor ဖြင့် အလိုအလျောက် နောက်ဆက်တွဲလုပ်ဆောင်ရန် အဓိကစက်နှင့် ထပ်တူပြုနိုင်သည့်အပြင် manual ဖြင့်လည်း ချိန်ညှိနိုင်သည်။
မော်ဒယ် EF စီးရီး ဖိုင်တွဲကော်စက်များသည် ဘက်စုံသုံးနိုင်ပြီး အဓိကအားဖြင့် အလတ်စားအရွယ်အစား 300g -800g ကတ်ထူပြား၊ 1mm-10mm ကွေးကောက်စက္ကူ၊ E,C,B,A,AB,EB ငါးမျက်နှာ ကွေးကောက်စက္ကူများအတွက်ဖြစ်ပြီး 2/4 ခေါက်၊ crash lock အောက်ခြေ၊ 4/6 ထောင့်သေတ္တာ၊ ပုံနှိပ်ထားသော အပေါက်ပါ ကတ်ထူပုံးများကို ထုတ်လုပ်နိုင်သည်။ သီးခြားမောင်းနှင်မှုနှင့် လုပ်ဆောင်ချက်မော်ဂျူး၏ဖွဲ့စည်းပုံသည် ဂရပ်ဖစ် HMI၊ PLC ထိန်းချုပ်မှု၊ အွန်လိုင်းရောဂါရှာဖွေခြင်း၊ ဘက်စုံသုံး အဝေးထိန်းခလုတ်တို့ဖြင့် အစွမ်းထက်သောအထွက်နှင့် ရိုးရှင်းပြီး အဆင်ပြေသောလည်ပတ်မှုကို ပေးစွမ်းသည်။ လွတ်လပ်သောမော်တာမောင်းနှင်မှုပါရှိသော ဂီယာသည် ချောမွေ့ပြီးတိတ်ဆိတ်သောလည်ပတ်မှုကို ဖန်တီးပေးသည်။ တည်ငြိမ်ပြီးလွယ်ကူသောဖိအားထိန်းချုပ်မှုအောက်ရှိ carrier အပေါ်ပိုင်းခါးပတ်များကို လွတ်လပ်သောလေဖိအားကိရိယာများဖြင့် ရရှိသည်။ တိကျသောအပိုင်းများအတွက် မြင့်မားသောစွမ်းဆောင်ရည်ရှိသော servo မော်တာများတပ်ဆင်ထားသော ဤစီးရီးစက်များသည် အလွန်တည်ငြိမ်ပြီးထိရောက်သောထုတ်လုပ်မှု၏လိုအပ်ချက်များကို ဖြည့်ဆည်းပေးနိုင်သည်။ ဖိုင်တွဲကော်စက်ကို ဥရောပ CE စံနှုန်းများနှင့်အညီ ထုတ်လုပ်သည်။
- မော်ဂျူလာဖွဲ့စည်းပုံဒီဇိုင်းသည် ဖောက်သည်၏လိုအပ်ချက်များအရ စက်လုပ်ဆောင်ချက်များကို အဆင့်မြှင့်တင်နိုင်သည်။
- ဖိုင်တွဲကော်လာမောင်းနှင်မှုနည်းလမ်းတစ်ခုလုံးသည်လွတ်လပ်သောထပ်တူပြုထားသောမော်တာမောင်းနှင်မှုကိုလက်ခံသည်။
- စက္ကူဘေးတိုက် ချိန်ညှိသည့် အပိုင်းဖြင့် အထူးတပ်ဆင်ထားသည်။
- အပေါ်ပိုင်းနှင့် အောက်ပိုင်း ခါးပတ်မောင်းနှင်မှုကို အားကောင်းစေပြီး ကျယ်ပြန့်စေသောကြောင့် လှိုင်းတွန့်ကတ်ထူပုံးများအတွက် သင့်လျော်ပါသည်။
- စက်သယ်ဆောင်ကိရိယာတစ်ခုလုံး၏ ချိန်ညှိမှုကို လွယ်ကူစွာ စတင်အသုံးပြုနိုင်စေရန် မော်တာဖြင့် ထိန်းချုပ်ထားသည်။
- အပေါ်နှင့်အောက် သယ်ဆောင်သူလှုပ်ရှားမှုသည် စက်ပိုင်းဆိုင်ရာတိကျမှုကိုသေချာစေရန် linear guide-rail စနစ်ကို အသုံးပြုသည်။
- တပ်ဆင်ရလွယ်ကူပြီး လည်ပတ်ရလွယ်ကူစေရန်အတွက် လူသားဆန်သောဒီဇိုင်း၊ ဆဋ္ဌဂံစပန်နာတစ်ခုတည်းဖြင့် စက်တစ်ခုလုံးကို ချိန်ညှိနိုင်သည်။
- နောက်ဆုံးခေါက်ခြင်း၊ ချိန်ညှိရန်အတွက် သီးခြားမော်တာများပါသည့် trombone အပိုင်းများနှင့် လေးထောင့်ကိရိယာပါသည့် ဖိ conveyor အပိုင်းတို့သည် လှိုင်းတွန့်ထုတ်ကုန်များ၏ “ငါးအမြီး” ဖြစ်စဉ်ကို ထိရောက်စွာ ရှောင်ရှားနိုင်ပါသည်။
- ဖိစက် သယ်ယူပို့ဆောင်ရေး အပိုင်းသည် လေဖိအား ဆလင်ဒါ စနစ်ကို အသုံးပြုထားပြီး ဖိအားကို ချိန်ညှိရလွယ်ကူကာ ထုတ်ကုန်များကို ထိရောက်စွာ တင်းကျပ်စွာ ကပ်ငြိစေပါသည်။
- ထိတွေ့မျက်နှာပြင်၊ ဂရပ်ဖစ် HMI၊ အဆင်ပြေစွာလည်ပတ်နိုင်ရန်အတွက် ဘက်စုံလုပ်ဆောင်ချက်ပါရှိသော အဝေးထိန်းခလုတ်။
A။နည်းပညာဆိုင်ရာဒေတာ:
| စွမ်းဆောင်ရည်/မော်ဒယ်များ | ၁၂၀၀ | ၁၄၅၀ | ၁၇၀၀ | ၂၁၀၀ | ၂၈၀၀ | ၃၂၀၀ |
| အများဆုံး စာရွက်အရွယ်အစား (မီလီမီတာ) | ၁၂၀၀*၁၃၀၀ | ၁၄၅၀*၁၃၀၀ | ၁၇၀၀*၁၃၀၀ | ၂၁၀၀*၁၃၀၀ | ၂၈၀၀*၁၃၀၀ | ၃၂၀၀*၁၃၀၀ |
| အနည်းဆုံး စာရွက်အရွယ်အစား (မီလီမီတာ) | ၃၈၀*၁၅၀ | ၄၂၀*၁၅၀ | ၅၂၀*၁၅၀ | |||
| သက်ဆိုင်သောစက္ကူ | ကတ်ထူပြား ၃၀၀ ဂရမ် - ၈၀၀ ဂရမ် ကွေးညွှတ်စက္ကူ F, E, C, B, A, EB, AB | |||||
| အများဆုံးခါးပတ်မြန်နှုန်း | ၂၄၀ မီတာ/မိနစ်။ | ၂၄၀ မီတာ/မိနစ် | ||||
| စက်အရှည် | ၁၈၀၀၀ မီလီမီတာ | ၂၂၀၀၀ မီလီမီတာ | ||||
| စက်အကျယ် | ၁၈၅၀ မီလီမီတာ | ၂၇၀၀ မီလီမီတာ | ၂၉၀၀ မီလီမီတာ | ၃၆၀၀ မီလီမီတာ | ၄၂၀၀ မီလီမီတာ | ၄၆၀၀ မီလီမီတာ |
| စုစုပေါင်းပါဝါ | ၃၅ ကီလိုဝပ် | ၄၂ ကီလိုဝပ် | ၄၅ ကီလိုဝပ် | |||
| အများဆုံးလေရွေ့လျားမှု | ၀.၇ မီတာ/မိနစ် | |||||
| စုစုပေါင်းအလေးချိန် | ၁၀၅၀၀ ကီလိုဂရမ် | ၁၄၅၀၀ ကီလိုဂရမ် | ၁၅၀၀၀ ကီလိုဂရမ် | ၁၆၀၀၀ ကီလိုဂရမ် | ၁၆၅၀၀ ကီလိုဂရမ် | ၁၇၀၀၀ ကီလိုဂရမ် |
အခြေခံသေတ္တာအရွယ်အစားအပိုင်းအခြား (မီလီမီတာ):
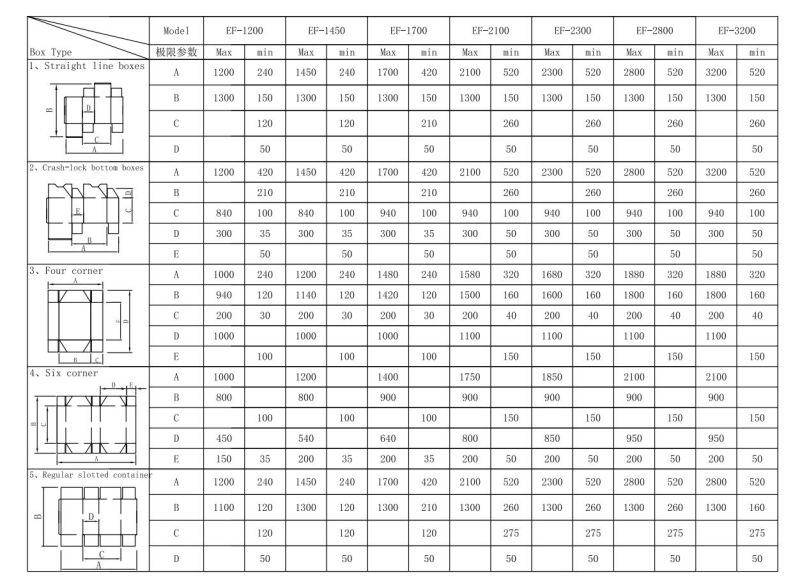
မှတ်ချက်- အထူးအရွယ်အစားရှိသော သေတ္တာများအတွက် စိတ်ကြိုက်ပြင်ဆင်နိုင်ပါသည်။
EF: 1200/1450/1700/2100/2800/3200
မော်ဒယ်အတွက် မှတ်ချက်-AC—အောက်ခြေတွင် crash lock ပါရှိသည်။PC—ကြိုတင်ခေါက်နိုင်သော၊ အောက်ခြေတွင် crash lock ပါဝင်ပါသည်။PCW--ကြိုတင်ခေါက်နိုင်သော၊ အောက်ခြေတွင် မတော်တဆ လော့ချနိုင်သော၊ ထောင့်သေတ္တာအပိုင်း ၄/၆ ခုပါရှိသည်
| မဟုတ်ဘူး။ | ဖွဲ့စည်းပုံစာရင်း | မှတ်ချက် |
| ၁ | Yaskawa servo မှ 4/6 Corner box device | PCW အတွက် |
| 2 | မော်တာဖြင့် ချိန်ညှိခြင်း | စံ |
| 3 | ကြိုတင်ခေါက်ယူနစ် | PC အတွက် |
| 4 | မှတ်ဉာဏ်လုပ်ဆောင်ချက်ဖြင့် မော်တာဖြင့် ချိန်ညှိမှု | ရွေးချယ်စရာ |
| 5 | ကြိုတင်ခေါက်ယူနစ် | ရွေးချယ်စရာ |
| 6 | တရွမ်ဘုန်းတီးခတ်ရင်း အပြေးသမား | စံ |
| 7 | LED ပြားပြသမှု | ရွေးချယ်စရာ |
| 8 | ၉၀ ဒီဂရီလှည့်ကိရိယာ | ရွေးချယ်စရာ |
| 9 | ကွန်ဗေယာရှိ လေဖိအားသုံး စတုရန်းကိရိယာ | ရွေးချယ်စရာ |
| 10 | NSK အပေါ်ဖိထားသော ဝက်ဝံ | ရွေးချယ်စရာ |
| 11 | အပေါ်ပိုင်းကော်တိုင်ကီ | ရွေးချယ်စရာ |
| 12 | ဆာဗိုမောင်းနှင်သော ထရွမ်ဘုန်း | စံ |
| 13 | မစ်ဆူဘီရှီ ပီအယ်လ်စီ | ရွေးချယ်စရာ |
| 14 | ထရန်စဖော်မာ | ရွေးချယ်စရာ |
စက်တွင် အအေးကော်ဖြန်းစနစ်နှင့် စစ်ဆေးရေးစနစ် မပါဝင်ပါ၊ သင်သည် ဤပေးသွင်းသူများထဲမှ ရွေးချယ်ရန် လိုအပ်ပြီး သင်၏ပေါင်းစပ်မှုအရ ကျွန်ုပ်တို့သည် ကမ်းလှမ်းချက်ပေးပါမည်။
| ၁ | KQ 3 ကော်သေနတ် (ဖိအားမြင့်စုပ်စက်ပါ) (၁:၉) | ရွေးချယ်စရာ |
| 2 | KQ 3 ကော်သေနတ် မြင့်မားသောဖိအားစုပ်စက်ပါရှိသည် (1:6) | ရွေးချယ်စရာ |
| 3 | HHS အအေးကပ်စနစ် | ရွေးချယ်စရာ |
| 4 | ကော်ကပ်ခြင်းစစ်ဆေးခြင်း | ရွေးချယ်စရာ |
| 5 | အခြားစစ်ဆေးမှုများ | ရွေးချယ်စရာ |
| 6 | သေနတ် ၃ လက်ပါ ပလာစမာစနစ် | ရွေးချယ်စရာ |
| 7 | KQ ကော်တံဆိပ် အသုံးပြုခြင်း | ရွေးချယ်စရာ |
၁။
အဓိက အစိတ်အပိုင်းများ အမှတ်တံဆိပ်နှင့် အချက်အလက်
| အရင်းအမြစ်ထွက်စာရင်း | |||
| အမည် | အမှတ်တံဆိပ် | မူလနေရာ | |
| ၁ | အဓိက မော်တာ | CPG | ထိုင်ဝမ် |
| 2 | ကြိမ်နှုန်းပြောင်းစက် | ဂျက်တက်ခ် | ယူအက်စ်အေ |
| 3 | HMI | ပန်နယ်မာစပါ | ထိုင်ဝမ် |
| 4 | ခြေလှမ်းခါးပတ် | တိုက်ကြီး | ဂျာမနီ |
| 5 | အဓိက ဝန်အား | NSK/SKF | ဂျပန် / ဆွစ်ဇာလန် |
| 6 | အဓိကဝင်ရိုး | ထိုင်ဝမ် | |
| 7 | အစာကျွေးခါးပတ် | နစ်တာ | ဂျပန် |
| 8 | ခါးပတ်ပြောင်းလဲခြင်း | နစ်တာ | ဂျပန် |
| 9 | ပီအယ်လ်စီ | ဖာတက်ခ် | ထိုင်ဝမ် |
| 10 | လျှပ်စစ် အစိတ်အပိုင်းများ | ရှနိုက်ဒါ | ပြင်သစ် |
| 11 | ဖြောင့်တန်းသောလမ်းကြောင်း | ဟိုင်ဝင်း | ထိုင်ဝမ် |
| 12 | နော်ဇယ် | ထိုင်ဝမ် | |
| 13 | အီလက်ထရွန်းနစ် အာရုံခံကိရိယာ | ဆန်က်စ် | ဂျပန် |
|
| |||
| ဆက်စပ်ပစ္စည်းများနှင့် သတ်မှတ်ချက်များ | ပမာဏ | ယူနစ် | |
| ၁ | လည်ပတ်ကိရိယာသေတ္တာနှင့်ကိရိယာများ | ၁ | သတ်မှတ် |
| 2 | အလင်းတန်းကောင်တာ | ၁ | သတ်မှတ် |
| 3 | Box-kick counter | ၁ | သတ်မှတ် |
| 4 | ဖြန်းဆေးကောင်တာ | ၁ | သတ်မှတ် |
| 5 | အလျားလိုက် pad | 30 | ပီစီများ |
| 6 | ၁၅ မီတာ အလျားလိုက်ပြွန် | ၁ | ချွတ် |
| 7 | အောက်ခြေကို လော့ချနိုင်သော လုပ်ဆောင်ချက် အစုံ | 6 | သတ်မှတ် |
| 8 | အောက်ခြေတွင် ပြိုကျမှုဒဏ်ခံနိုင်သော လုပ်ဆောင်ချက်ပါသည့် မှို | 4 | သတ်မှတ် |
| 9 | ကွန်ပျူတာ မော်နီတာ | ၁ | သတ်မှတ် |


